30.08.2006, 12:07
Небольшое описание автономного многофункционального робота повышенной
проходимости от компании Robosoft.
Robosoft представляет свое последнее достижение в области многоколесных
роботов для решения задач рекогносцировки и выполнения других операций на
пересеченной местности. Это роборазведчик robuROC-6.
Первая модель робота была создана в рамках исследовательской программы Minirac,
финансировавшейся французской военно-промышленной компанией DGA/SPART. Для
соответствия всем необходимым требованиям и был разработан robuROC-6 – мобильный
робот, отличающийся высокой скоростью и повышенной проходимостью. Специальная
гидравлическая подвеска трех платформ с колесами позволяет роботу не терять
опору, даже если одно из колес наедет на высокое препятствие. Платформы могут
поворачиваться друг относительно друга на угол до 30 градусов в обе стороны, что
еще больше увеличивает проходимость робота. Эта система дает возможность
перебираться через препятствия и ямы, в которые колесо может провалиться, без
потери устойчивости.
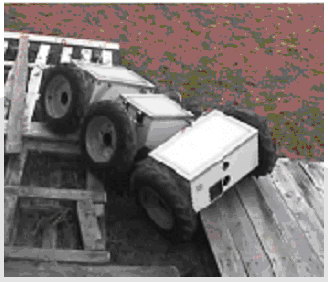 Специальная гидравлическая подвеска Специальная гидравлическая подвеска
обеспечивает устойчивость робота при прохождении препятствий.
6 больших колес с глубоким протектором также увеличивают проходимость машины.

Глубокий протектор гарантирует надежное сцепление с мягким грунтом, песком или травой.
Модульная система robuROC-6, технология формирования команд управления
“Icorecontrol command technology™” и открытая архитектура позволяют
устанавитьмножество модулей, оптимальных для каждого конкретного приложения,
например:систему машинного зрения, лазерные системы широкого профиля,
инфракрасные датчики, ультразвуковые датчики, наклонные контейнеры для крепления
произвольного полезного груза, устройства беспроводной связи, манипуляторы и
многие другие.
Для повышения скорости движения по ровной поверхности предусмотрена возможность
подъема средней платформы. Таким образом, повышается скорость движения робота,
падает расход энергии, но в то же время уменьшается проходимость.

Средняя часть робота поднята для повышения скорости движения.
Конструкция робота совместима со следующими модулями компании Robosoft:
- Литий-ионные батареи Roburoc;
- Компьютеры (промышленные или с облегченной комплектацией);
- Система технического зрения с ptu;
- Набор модулей для ночного/дневного режимов работы;
- Устройства беспроводной связи;
- Лазерный сканер Sick® Lms;
- Компьютеризованная навигационная система;
- Приемник GPS;
- Ультразвуковые датчики;
- Датчики ускорения.
Технические параметры робота:
- Длина: 160 см, Ширина: 78 см (включая колеса);
- Диаметр колес: 50 см;
- Примерный вес 160 кг (включая литий-ионные батареи;
- Клиренс: 400 мм;
- Скорость 3,61 м/с;
- Максимальный наклон: 45 градусов;
- Грузоподъемность 100 кг;
- Радиус поворота: 0 – разворот на месте;
- Питание: 3 литий–ионовых батареи;
- Время работы без перезарядки: 3-5 часов;
- Влажность: 5-95% (без конденсации);
- Моторы: 6 бесщеточных электродвигателей;
- Управление: джойстик с прямой передачей;
- Конструктивные особенности: 3 сочлененных платформы, синхронизованных активной гидравлической системой.
Базовая комплектация:
- 6 бесщеточных моторов с синхронизатором;
- Зарядное устройство;
- Джойстик управления;
- Система аварийного останова (кнопочная, беспроводная);
- Передний и задний бамперы;
- Встроенный промышленный персональный компьютер (Linux, RTai, SynDEX);
- Встроенный контроллер Motorola RSMPC 555;
- Программное обеспечение управления:
- ИЛИ последовательный интерпретатор команд;
- ИЛИ библиотеки C++ Linux для управления из произвольного приложения linux+rtai на базовом компьютере;
- ИЛИ модуль разработки приложений для режима реального времени Syndex (требуется пройти обучающий курс).

Новая модель робота с дополнительными модулями.
Здесь можно скачать видео, демонстрирующее возможности робота (4,18 Mb).
Автор конструкции: Robosoft Robosoft
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
