Роботы хромают после травмы как люди
26.07.2015, 19:50
Источник: 3dnews.ru
Изобретатели разработали любопытного шестиногого робота, который умеет быстро менять способ передвижения при повреждении конечностей, например при потере одной из ног. Специальный алгоритм автоматически восстанавливает работоспособность устройства. Такая техника может пригодиться для роботов, выполняющих миссии в зонах с агрессивной средой.
По мнению разработчиков, самовосстанавливающиеся роботы являются прекрасным решением в ситуациях, когда люди не могут диагностировать и устранить проблему дистанционно. Свой проект по созданию шестиногого робота Джош Бонгард с коллегами запустил ещё в 2006 году. Согласно задумке, робот должен уметь диагностировать «травмы» и самостоятельно рассчитывать новые шаблоны движения, которые позволят ему продолжить функционирование. Задумка удалась, но лишь частично — созданный робот восстанавливался очень медленно.
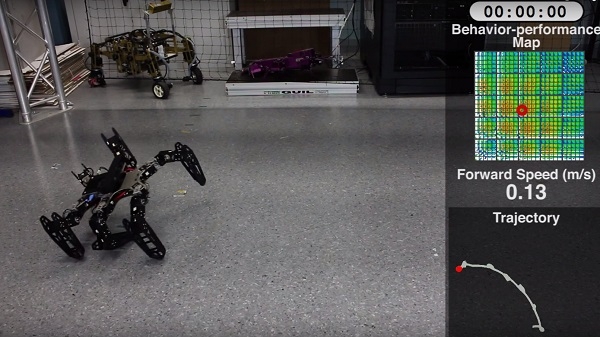
В своей последней работе изобретатели применили так называемую shortcut-стратегию, которая предусматривает быстрый перебор всевозможных заранее заложенных шаблонов передвижения вместо длительной диагностики проблемы и составления подходящего нового алгоритма. Конечно же, он ищет не идеальный вариант, а лишь тот, который обеспечивает приемлемый уровень для дальнейшей работы.

Шестиногий робот имеет библиотеку из более чем 13 тысяч шаблонов передвижения. Разработчики изначально закодировали шаблоны тридцати шестью переменными параметрами, такими как ширина шага, угол передвижения и другими. Далее было решено уменьшить их количество до шести, что позволило ощутимо ускорить работу алгоритма. Робот теперь может восстановить ходьбу всего за одну минуту после повреждения. Интересно, что в некоторых случаях оптимальным способом передвижения оказывается простое прыганье.
Одним из главных достоинств нового подхода является использование только программного обеспечения, то есть вторжения в специфический физический дизайн робота не требуется. В настоящее время Бонгард со товарищи изучают возможность применения алгоритма для более сложных машин.
|
Ключевые слова: передвижение робот шаблоны алгоритм травмы шестиногий робот диагностировать хромать закодировать Разработчики библиотека Минироботы робот
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
