19.01.2010, 09:12
Источник: New Scientist

|
Используемая в опытах ходячая машина называется AMOS-WD06 (Advanced Mobility Sensor Driven-Walking Device). Её создателей вдохновил американский таракан. Учёные говорят, что отточенная на этом гексаподе техника должна одинаково хорошо работать и на четвероногих, и на колёсных машинах (фото Network Dynamics Group, Max Planck Institute for Dynamics and Self-Organization). |
Контролируемый хаос в качестве новой стратегии для создания сложного поведения автономных роботов предлагают германские исследователи. Их шестиногая машинка может самостоятельно и гибко менять походку в зависимости от ситуации.
У людей и животных периодически повторяющиеся движения (такие как ходьба и дыхание) находятся под контролем так называемых центральных генераторов образцов (Central pattern generator – CPG), объясняют учёные в пресс-релизе общества Макса Планка. И этот принцип широко используется в разработке ходячих машин. Однако покамест, как правило, для каждой походки необходим отдельный генератор. То есть датчики робота собирают информацию об окружающей среде, и машина, основываясь на этих данных, выбирает подходящий CPG.
Авторы новой работы уверены, что робот может менять больше десятка разных походок, довольствуясь лишь одним генератором, и секрет успеха заключается как раз в управлении хаосом. Идея, конечно, далеко не нова, но на сей раз она реализована за счёт маленькой и простой нейронной сети, состоящей всего из пары элементов.
Смысл вот в чём: когда какой-либо из 18 сенсоров машины фиксирует возникновение угрозы (к примеру, нога застревает в дырке или повышается температура), робот начинает хаотическую последовательность движений, быстренько перебирая весь свой "репертуар", пока не выкарабкается из ловушки или не убежит от опасности.
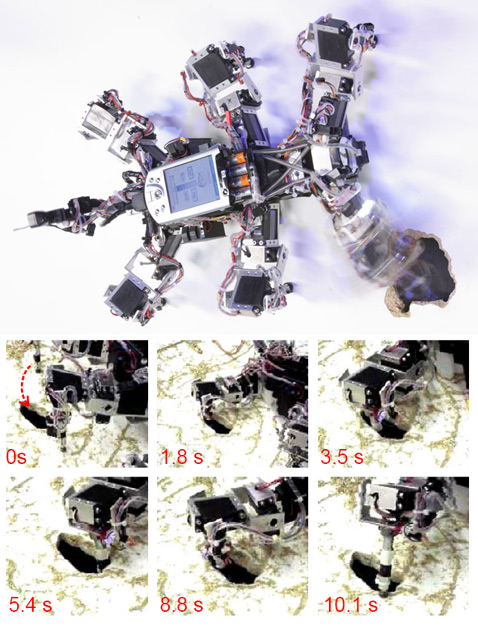
| | Пример того, как хаос помогает роботу вытащить ногу из дырки. В углу мелких снимков – отсчёт в секундах времени, потребовавшегося для освобождения (фото Network Dynamics Group, Max Planck Institute for Dynamics and Self-Organization). |
Таким образом создаются различные модели походки для определённых ситуаций, которые можно запрограммировать или извлечь из опыта нейронной сети. Правда, для того чтобы робот мог учиться на своих ошибках, его нужно оснастить моторной памятью, чем немецкие учёные и планируют заняться. Об уже достигнутых успехах исследователи отчитались в Nature Physics.
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
