Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте
Надутая микрорука перед хирургией тренируется на красной икре
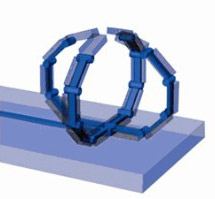
Каждая камера в суставе пальца соединена с внешним насосом длинной и очень тонкой трубочкой. Так что, накачивая в камеры воздух или откачивая его обратно, можно с высокой точностью управлять всеми суставами этой гибкой кисти. Создатели манипулятора не зря применили пневматический привод. Так в одном пучке тонких каналов совместилась и система передачи команд, и силовой привод. Но главное — отсутствие электричества позволяет говорить о полной безопасности применения такого механизма внутри тела и безразличия манипулятора к среде, в которой ему предстоит работать.
По сочетанию малого размера (порядка одного миллиметра), диапазону доступных пальцам движений и возможностям захвата (две пары противостоящих пальцев) Microhand не имеет себе равных. Также важно, что зонд, на конце которого будет работать новый манипулятор, можно сделать более тонким и гибким, чем те инструменты, которые применяются в малотравматической хирургии сейчас. До внедрения Microhand в массовое производство и хирургическую практику ещё далеко. Но, с другой стороны, Ким уже работает совместно с одной из компаний, производящих медицинское оборудование и инструменты, над созданием аналогичной модели микроманипулятора чуть-чуть большего размера. Пусть новый образец немножко уступит нынешнему рекордсмену в миниатюрности, зато Чан-Цзинь сотоварищи намерены оснастить пальцы этой руки оптоволокном, дабы обеспечить хирургам передачу изображения прямо с места событий — изнутри человеческого тела. Какими объектами будет манипулировать такой робот – не столь уж важно. Важно, для пациентов, что делать это он будет очень нежно. На икринках же тренировался.
Источник: Membrana.ru |
Надутая микрорука перед хирургией тренируется на красной икре » Манипуляторы роботов
Самая маленькая в мире рука для робота, поперечник кисти которой (когда она сжата в кулак) насчитывает один миллиметр, исправно перетаскивает крошечные икринки. Но американские левши прочат своему манипулятору иную работу. Однажды, полагают исследователи, микроскопические пальцы будут проводить виртуозные операции внутри тела пациента.