Бесчеловечные машины победили пустынный городок
31.01.2008, 16:04

Глава Tartan Racing Ред Уайттекер (Red Whittaker) держит в руках первый приз, завоёванный его командой в гонке машин-роботов DARPA Urban Challenge.
|
Сирены и жёлтые мигалки предупреждали зрителей о приближении беспилотных машин. Но автомобили, оснащённые искусственным интеллектом, и так было сложно спутать с обычными. И пусть в этой гонке иные "железные водители" допускали ошибки, она войдёт в историю: впервые роботы-автомобили показали, что способны передвигаться в городском трафике без команд извне.
3 ноября 2007 года в местечке Викторвилль (Victorville), что в Калифорнии, успешно прошла гонкаDARPA Urban Challenge — первое в мире соревнование автомобилей-роботов в городских условиях. Два года назад беспилотные машины впервые в истории доказали, что способны не просто работать в реальной обстановке (на местности), но самостоятельно преодолевать весьма протяжённые маршруты. Тогда несколько транспортных средств, оборудованных сонмом камер, лидаров, радаров и мощных компьютеров, победили пустыню. Потом было принято решение о переносе этой гонки в город.

Трасса DARPA Urban Challenge .
|
Мы рассказывали о подготовке этого состязания. Напомним лишь, что автомобили должны были преодолеть сложный городской маршрут: проехать кучу перекрёстков (разных типов) и поворотов, большие и маленькие улицы, заехать на парковку и выехать из неё, выполнить кучу прочих манёвров. И всё — самостоятельно. Конечно, устроители гонки (из научно-исследовательского агентства Пентагона DARPA) приняли целый ряд мер для обеспечения безопасности. Начиная с того, что город, в котором проходило соревнование, был искусственным: его возвели на месте бывшей военной авиабазы Джордж (George). Так что жителей тут не было — только зрители и судьи на трибунах и за ограждениями. Кроме того, за каждым автомобилем-участником гонки следовала обычная легковушка с людьми борту. Нет, здесь никто не управлял роботами дистанционно. Но в машинах сопровождения экипажи везли аварийные кнопки, которые могли полностью выключить роботов, если бы те вдруг решили направиться в опасную сторону (к трибунам, например). А так обстановка на полигоне была самой привычной. Дома, улицы и тротуары, дорожные знаки и разметка... Здесь не было установлено каких-либо радиомаяков или ламп вдоль краёв дорог — никаких поблажек. Любой водитель или пешеход, попав сюда, увидел бы самый обычный маленький провинциальный городок. Так что машинам надо было напрягать свои "мозги", чтобы пройти намеченный судьями маршрут. Тем более что вместе с роботами по городу ездило ещё 30 обычных авто, управляемых людьми, — для создания более-менее правдоподобного трафика. И это не считая упомянутых машин сопровождения.

Кадры с финала состязания, его предварительных этапов и тестов в Викторвилле дают представление об обстановке на DARPA Urban Challenge. Обратите внимание: помимо автомобилей-роботов, здесь были и обычные машины с водителями за рулём — для создания реалистичных помех .
|
В целом можно сказать, что необычные транспортные средства замечательно справились с невиданной ранее задачей. Хотя некоторые небольшие казусы всё же случались. Так, два компьютеризированных авто ухитрились столкнуться между собой. Случилось это на небольшой скорости, и ДТП обошлось практически без повреждений. Оба робота успешно продолжили гонку.

Печальный финиш TerraMax, который уткнулся носом в стенку небольшого магазинчика.
|
Ещё зрителей немного повеселил робот TerraMax, созданный компанией Oshkosh Truck. Примечательна машина хотя бы тем, что это — довольно крупный и тяжёлый грузовик, единственный на DARPA Urban Challenge (остальные команды превращали в роботов легковушки, джипы и минивэны). Ради него даже пришлось во время постройки трассы выбрать побольше ширину дороги. В 2005 году TerraMax принимал участие в DARPA Grand Challenge, и пусть в тот раз он пришёл к финишу последним, аппарат от Oshkosh Truck стал одним из пяти автомобилей-роботов, преодолевших весь маршрут гонки (из 23 стартовавших). А в нынешнем соревновании искусственный интеллект TerraMax оплошал, и через некоторое время после начала гонки жёлтый беспилотный грузовик закончил состязание, заехав в пустой (как и всё в этом искусственном городке) магазин. Не только компьютер TerraMax дал маху. Из-за различных проблем очень многие команды не сумели завершить гонку. Но три лидера (все, уложившиеся к тому же в 6-часовой лимит времени, определённый правилами) показали образцовую езду. Машины-роботы терпеливо пропускали на перекрёстках другие авто (идущие по главной дороге), после чего аккуратно поворачивали в нужном направлении, не забыв заранее включить поворотники. Так же осторожно и неспешно, словно начинающие водители, опасающиеся дорожной полиции, они выполняли и другие задачи на трассе. И так без приключений добрались до финиша.

Автомобиль Boss на трассе гонки, испытаниях и на финише (на врезке).
|
Призовые $2 миллиона за первое место в DARPA Urban Challenge ушли команде Tartan Racing, созданной специалистами из университета Карнеги-Меллона (Carnegie Mellon University) и компании General Motors. Их машина Boss (построенная на основе Chevrolet Tahoe) преодолела городскую дистанцию длиной около 90 километров за 4 часа. Средняя скорость составила примерно 22 километра в час. Команда утверждает, что одной из ключевых технологий, позволивших роботу превосходно ориентироваться в обстановке, стал новый лидар. Он представляет собой блок из 64 лазеров, вращающийся со скоростью 10 оборотов в секунду и производящий за это время по миллиону измерений дистанции до самых различных предметов. Крис Урмсон (Chris Urmson), главный инженер Tartan Racing, пояснил, что лидар создавал в компьютере целое "облако точек", по которому машина могла понять — где находятся другие автомобили, здания, деревья, бордюры и так далее. Лидаром, впрочем, "глаза" робота не исчерпывались — на крыше у него были смонтированы цифровые камеры. "Это большой день для робототехники", — заявил Крис после триумфального завершения субботней гонки.

Финиш робота Junior.
|
Команда из университета Стэнфорда — Stanford Racing, которая в 2005 году в гонке автомобилей-роботов по пустыне оказалась победителем — в этот раз также выступила весьма достойно, завоевав второе место. Машина Junior (созданная на основе Volkswagen Passat Variant) принесла Стэнфорду $1 миллион призовых денег. Она потратила на преодоление всей дистанции примерно на 20 минут больше, чем робот-победитель. Ну а приз в $500 тысяч (третья ступенька пьедестала) достался команде VictorTango политехнического института Вирджинии (Virginia Tech). Её автомобиль Odin (превращённый в робота Ford Escape Hybrid) затратил на гонку на 20 минут больше времени, чем Junior, и, соответственно, на 40 минут больше, чем Boss.
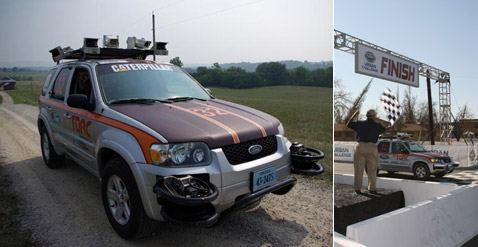
Odin во время тестов и на финишной черте .
|
Вообще же, надо отметить, что в финал этого соревнования вышло 11 команд (а в ведь полуфинале их было целых 36). Но только шесть машин-роботов пересекли финишный створ после целого дня поездок по городу. Директор DARPA Тони Тезер (Tony Tether) назвал результаты соревнования "фантастическим достижением" и подчеркнул, что отработанные здесь технологии готовы для передачи в другие компании и институты для дальнейшего углубления и развития. Также Тезер особо отметил, что ни одна из трёх машин-победительниц не нарушила правила дорожного движения, так что три места на подиуме распределились исключительно по времени прохождения дистанции этими автомобилями. Ларри Бёрнс (Larry Burns), вице-президент GM, комментируя субботнюю гонку, заявил, что разработка серийных авто с системой искусственного интеллекта, позволяющей им самостоятельно ездить в городских условиях — одно из важных направлений развития автоиндустрии. "Представьте себе, что вы одновременно разговариваете по телефону, поедаете завтрак и просматриваете почту, совсем бросив управление своим автомобилем", — поясняет Бёрнс. Он утверждает, что авто с таким уровнем "сознания" появятся на дорогах в 2015 году.
Источник: Membrana
|
Ключевые слова: роботы Challenge DARPA гонки Urban TerraMax автомобили машины гонка Racing Junior маршрут дистанции гонка Искусственный интеллект робот
|
 Обратная связь
Обратная связь Реклама на сайте
Реклама на сайте